4. Сборка и настройка FPV БПЛА
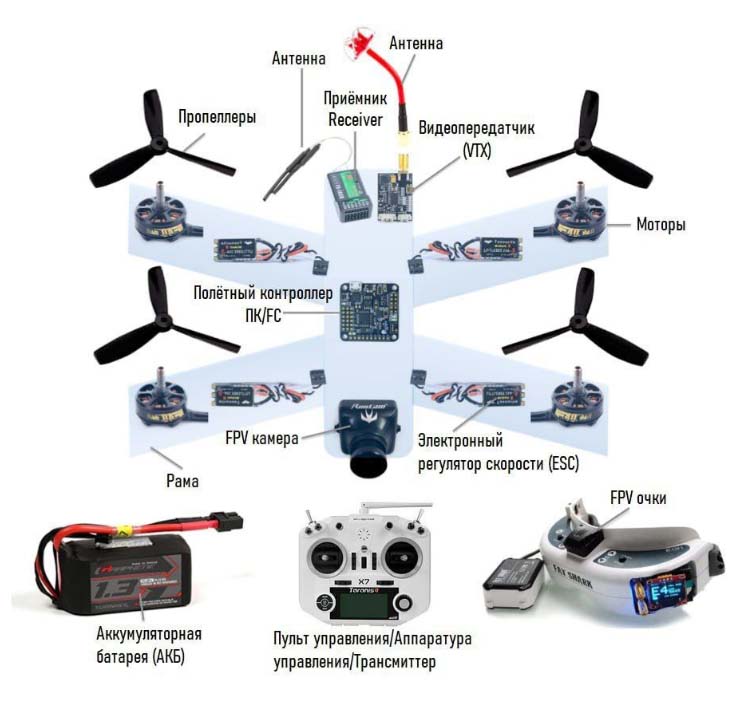
Модули (узлы, части, комплектующие, элементы) из которых состоит FPV-дрон:
варианты с ценой и ссылками на приоберетение комплектующих: квадрокоптер 7" и квадрокоптер 9"
Модули оператора:
Принципы взаимодействия узлов, модулей, элементов квадрокоптера
- Оператор получает видео от дрона на очки\шлем или экран (планшет, телевизор). /подробнее - OSD/
Оператор управляет дроном посылая сигналы управления
Приемник-Reciver передаёт полученные данные в => FC (Flight controler - полетный контролер). О приемниках телеметрии ЗДЕСЬ. Контроллер обрабатывает данные и передает управляющие сигналы в => ESC электронный контроллер скорости (в один из четырех по количеству моторов) который выдаёт необходимое рабочее напряжение на => мотор
Для собрки FPV-дрона должно быть понимание принципа работы: собранный дрон, с подключенной АКБ находится в дежурном режиме ожидания команд от оператора. Оператор через пульт управления посылает команды-сигналы. Первая команда - ARM - включение моторов. Последующее управления разбираем на первых уроках симуляторов.
Дрон принимает сигнал на антенну приемника. => Приемник-Reciver передаёт полученные данные в => FC (Flight controler - полетный контролер). О приемниках телеметрии ЗДЕСЬ. Контроллер обрабатывает данные и передает управляющие сигналы в => ESC электронный контроллер скорости (в один из четырех по количеству моторов) который выдаёт необходимое рабочее напряжение на => мотор
передает контролер Оператор желает поднять дрон, например, или ускорить горизонтальный полет, сделать поворот.
Сигнал передается на Полетный Контроллер который рассчитывает что нужно сделать. ПК принимает во внимание данные датчиков - скорость, угол наклона, если подклбючены датчики давления, координаты и т.д. Управляющие сигналы передаются на контролеры скорости ESC. Сигнал от ESC передается на моторы, которые меняют скорость вращения - тем самым увеличивая или уменьшая тягу. Разница тяги, мощности, просчитывается ПК и сигнал снова передается на управления. Таким образом Оператор через Полетный Контролер получает необходимые режимы полета дрона.
Когда визуальный контроль полета невозможен, Оператор наблюдает за полетом через очки\шлем или экран куда выводять необходимые данные.
рама, ПК, ESC, ВМГ, антенны, VTX, приемник.
power distribution board for copter
платы распределения питания (ESC).
Глобально следует понимать, что рама является "монтажным столом" для сборки квадрокоптера. После сборки рамы на неё навешивают все остальные элементы.
Рекомендую идти от переферии к центру:
1. устанавливаете моторы. ВАЖНО! пропеллеры на моторы устанавливаются в самую последнююю очередь. Перед тестовыми полетами.
2. прокладываете провода от моторов к месту установки контролеров скорости /ESC/ или полетному контроллеру.
3. размещаете на раме приёмник управления, передатчик видеосигнала, камеру. Протягиваете проводку к контролеру.
4. Осуществляете пайку всех проводов согласно документации на оборудование. Преимущественно на ПК.
Напоминаем про пайку
Напоминаем про Технику Безопасности при паянии
Начинаем все узлы собирать в единое целое на примере сборок квадрокоптеров 7" на трех видах рам - фанерной, карбоновой и пластиковой. /подробнее о рамах ЗДЕСЬ/
Различия сборки - в использовании болтов-винтиков (далее болты, чтоб не путать с винтами-пропеллирами) различной длины. На фанерной раме - самые длинные, т.к. - самая "толстая" рама. Производитель предусмотрел этот момент и в комплекте идут соответствующие болты.
Квадрокоптеры представленные на фото ниже предназначены для использования в рамках школы БПЛА. Следовательно есть некоторые допущения - все электрические подсоединения (моторы, приемник и передатчик, камера) реализованы через разъемы - для возможности быстрой смены конфигурации или перестановки блоков между рамами. Для личного или "боевого" применения вся пайка и присоединение электроники осуществляется напрямую.
1. Электрическая или электронная сборка.
Для сборки электронной части - паяльник и все что связано с пайкой, тестер
Инструмент и схема.
В зависисимости от типа ПК
2. Механическая сборка.
Инструмент для механической сборки: крестовая и плоская отвертка, Torx-8
Собираем раму - я реально засекал время на телефоне и эмпирическим путем осознал, что для новчика первоначальная сборка может занять длительное время - сорок минут или даже час. Последующие сборки рам происходят в разы быстрее.
Монтаж ПК и ВМГ на раму
3. Настройка, привязка биндин
Для настройки - провод USB - TypeC или Micro, соответствующий разъему на ПК, для подключения полетного контроллера к компьютеру (ноутбуку).
Монтаж ПК и ВМГ на раму
4 Ремонт в полевых условиях - для экстренного запуска дрона все методы хороши. Подойдет и скрутка и наматывание фольги для контакта или прокладывание изоленты и стекла для исклюяение соединения. ****
Книги, справочники, руководства, мануалы и инструкции для оператора БПЛА / Словарь / Программы, soft оператора БПЛА /
Контакты: 1. Группа в телеграмм канале: Сыны Отечества 2. Личное общение @SynyOtechestvaRu